
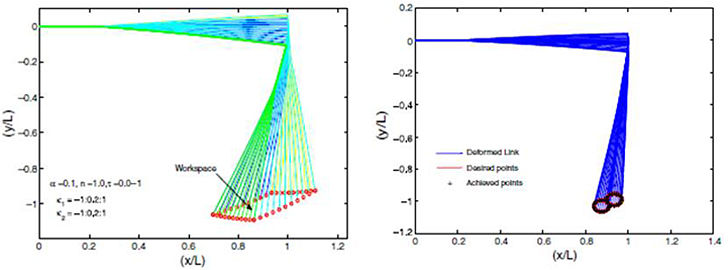
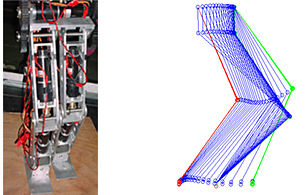
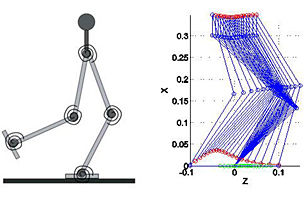
Compliant-link biped trajectory
The Robotics and Mechanisms area seeks to promote research and develop technologies that enable systems to exhibit intelligent, goal-oriented behavior, and developing innovative instruments to monitor, manipulate, and control systems. Overall, our research spans the following areas: humanoid robots, intelligent control systems, flexible manipulators, mechanism theory, microsensors and actuators, and compliant mechanism. We focus on enabling technologies that necessitate novel design solutions in terms of development of new methods of synthesis, analysis & optimization of novel robots and mechanisms.
Research Areas
- Analysis, synthesis and motion planning of robots and mechanisms
- Biped Locomotion: Design and experimentation of optimal energy efficient biped robots with compliance at foot, knee joints, etc.
- Exoskeleton: Human motion based design and development of a three finger 10 DOF exoskeleton robot hand for rehabilitation of stroke patients.
- Intelligent control systems: Design, development and path planning of 14 DOF Lunar rover on 3D terrain. Kinematics and redundancy resolution for performing tasks with arm on rover.
- Micro Sensors and Actuators: Ionic Polymer Metal Composite (IPMC) based grippers and mechanisms for robotic micro assembly.
- Smart compliant mechanisms
Research Laboratories
Robotiscs Laboratory
Smart Materials, Structures and Systems Laboratory
Compliant and Robotics Systems (CARS) Lab
Associated Faculty
Bhaskar Dasgupta, PhD (IISc Bangalore): Parallel manipulators, redundant manipulators, robot motion planning, multi modal optimization, domain mapping.
Ashish Dutta, PhD (Akita University, Japan): Humanoid robotics: design, control and motion planning of compliant and rigid link bipeds; Hand exoskeleton: design and control of hand exoskeletons for rehabilitation of stroke patients; Motion planning: path planning and redundancy resolution of mobile manipulator systems like lunar rover etc.; smart materials: design of grippers/mechanisms for micro robotic assembly using ionic polymer metal composites.
Research facilities
| Compliant and Robotics Systems (CARS) Lab | Compliant Mechanisms and Robotic Systems |
| Robotics Lab |
|
| Smart Materials, Structures & Systems Laboratory | 3D Laser Doppler Vibrometer, dSpace ACE 1103, 1104, Multi channel SMA amplifiers, d33 meter, Magnetic Levitation Control |